Back to List
Transformer
宇宙機・宇宙ロボットの構造を大きく変形させる可変構造技術の構築により,これまでにない新たな軌道上科学観測のプラットフォームを提供し,天文学や惑星科学などに貢献します.
The construction of variable structure technology that can significantly transform the structure of spacecraft and space robots will provide an unprecedented new platform for on-orbit scientific observation and contribute to astronomy and planetary science.
Mission Brief
本研究グループで実現を目指しているトランスフォーマー宇宙機とは,パネル構造やボックス構造などの複数の形態要素が互いに回転ジョイントなどの駆動関節によって接続された構造を持つ宇宙機です.駆動関節の動作により様々な形状に変形することが可能であり,異なる形状への変形によって複数の機能モードの実現が可能となります.このとき,複数の駆動関節を適切な順番で繰り返し動作させることで宇宙機が有する非ホロノミック性を利用した「形状と姿勢の同時制御」を行い,これまでにない宇宙機を実現することが可能となります.これは,将来のフリーフライングロボット技術への礎ともなります.
本宇宙機は技術実証衛星であり,前述のような「形状と姿勢の同時制御」の技術実証に加え,それに伴う関連技術(アストロダイナミクス,構造,熱,通信,パネル駆動など)の実証や,その特徴を有効に活用した理学観測ミッションの実現を目指しています.また,後述の小円halo軌道への軌道投入後は本宇宙機の技術実証に加え,観測モードの状態で理学観測ミッションとして搭載する干渉計とフーリエ分光計による天体観測を行います.
前述のようにトランスフォーマー宇宙機の最大の特徴は非ホロノミック性を利用した「形状と姿勢の同時制御」です.非ホロノミック性とは非ホロノミック拘束と呼ばれる運動に関する拘束条件に基づく性質です.一般に機械の運動が何らかの拘束を受けるとき,その自由度は少なくなります.一方,非ホロノミック拘束では自由度が減ることはなく,機械の動き方を組み合わせることで,様々な方向に動くことができます.このような非ホロノミック性を持つものは身の回りにも数多く存在します.例えば,猫は背中を下方に向けた静止状態から落下したとしても,身体をひねることで脚を地面に向け安全に着地することができます.これは「猫ひねり」としても知られている現象です.角運動量がゼロに保存され,内部にリアクションホイールやスラスタなどのトルクを発生する仕組みがないにも関わらず,猫は関節の動きを適切に組み合わせることで空中で姿勢を変化させることができます.さらに,着地時に足で地面を捉えるように体の形を整えており,姿勢と形状を同時に制御していると捉えることができます.
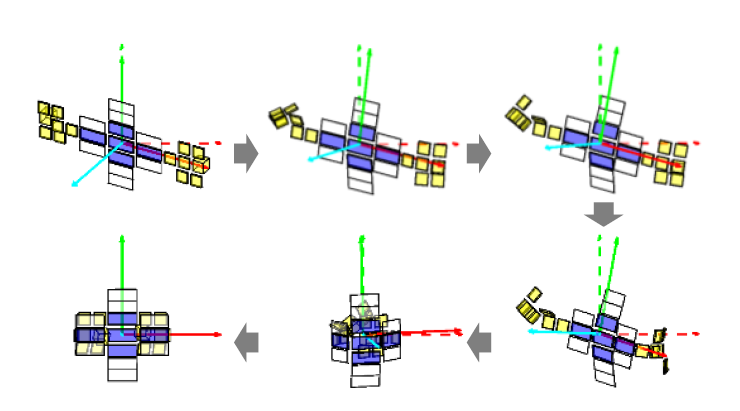
本宇宙機は複数の駆動関節を適切な順番で駆動させることで,形状を制御しつつ同時に希望の姿勢を実現することが可能です.各関節の適切な組み合わせと繰り返しによって,初期姿勢から目標状態へ姿勢変更を達成しています.更に多くのの駆動関節の運動も組み合わせることで,より効率的かつ高精度に希望の姿勢変更を行うこともできます.
The transformer spacecraft that this research group aims to realize is a spacecraft with a structure in which multiple morphological elements, such as a panel structure and a box structure, are connected to each other by drive joints, such as rotary joints. The transformer can be transformed into various shapes by the movement of the drive joints, and multiple functional modes can be realized by transforming into different shapes. By repeatedly operating multiple drive joints in the appropriate order, the spacecraft can achieve "simultaneous control of shape and attitude" utilizing its nonholonomic nature, thereby realizing an unprecedented spacecraft. This will be the foundation for future free-flying robot technology.
This spacecraft is a technology demonstration satellite, and in addition to the technology demonstration of "simultaneous shape and attitude control" as described above, it aims to demonstrate related technologies (astrodynamics, structure, heat, communications, panel drive, etc.) and to realize a physical observation mission that effectively utilizes its features. In addition to the technical demonstration of the spacecraft after orbit insertion into the small-circle halo orbit described below, astronomical observations will be performed using the interferometer and Fourier spectrometer to be installed as a scientific observation mission in the observation mode.
As mentioned above, the most important feature of the Transformer spacecraft is "simultaneous control of shape and attitude" using nonholonomic characteristics. Nonholonomicity is a property based on constraints on motion called nonholonomic constraints. Generally, when the motion of a machine is subject to some constraint, its degree of freedom is reduced. Nonholonomic constraints, on the other hand, do not reduce the number of degrees of freedom and allow the machine to move in a variety of directions by combining the ways it moves. There are many such nonholonomic objects around us. For example, even if a cat falls from a stationary position with its back facing downward, it can twist its body to land safely with its legs facing the ground. This phenomenon is also known as "cat twist. Despite having zero angular momentum and no internal torque-generating mechanisms such as reaction wheels or thrusters, cats can change their posture in the air through an appropriate combination of joint movements. Furthermore, the cat's body is shaped so that its feet touch the ground when it lands, and it can be considered to be controlling its posture and shape at the same time.
By driving multiple drive joints in the proper order, the spacecraft can achieve the desired posture while simultaneously controlling its shape. The appropriate combination and repetition of each joint enables the spacecraft to change its attitude from the initial attitude to the target state. The desired posture change can also be achieved more efficiently and precisely by combining the motion of many more drive joints.